В мире точной автоматизации и робототехники, где каждое движение должно быть предсказуемым и контролируемым, шаговые двигатели занимают особое место. В отличие от обычных DC-двигателей, которые вращаются непрерывно, шаговый двигатель преобразует электрические импульсы в дискретные угловые перемещения, или «шаги». Эта уникальная особенность позволяет ему точно позиционироваться без необходимости в дорогостоящих и сложных системах обратной связи, пока не пропущены шаги.
В этой статье мы подробно рассмотрим принцип работы шаговых двигателей, их основные типы, различные режимы управления, а также ключевые аспекты выбора и применения.
Что такое шаговый двигатель? Основы концепции
Шаговый двигатель — это электромеханическое устройство, которое преобразует электрические импульсы в точно фиксированные угловые или линейные перемещения. По сути, он движется не плавно, а пошагово, фиксируясь в каждой новой позиции.
Его ключевая особенность заключается в способности выполнять очень точное позиционирование. Если обычный электродвигатель просто вращается, когда на него подается напряжение, то шаговый двигатель перемещается на определенный фиксированный угол (шаг) за каждый электрический импульс. Это делает его идеальным для задач, где важен точный контроль положения, а не только скорость вращения.
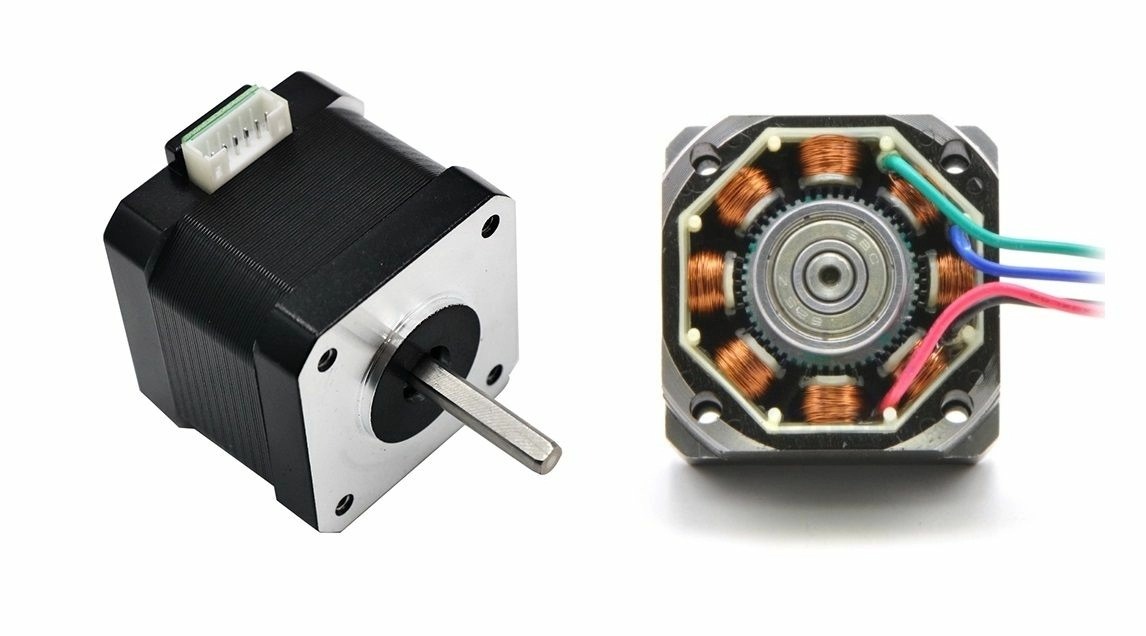
Основные компоненты шагового двигателя:
- Статор: Неподвижная часть двигателя, на которой расположены обмотки (катушки индуктивности). При подаче тока на обмотки они создают магнитное поле.
- Ротор: Подвижная часть, которая вращается. В зависимости от типа двигателя, ротор может содержать постоянные магниты или быть выполнен из мягкого железа с зубцами.
- Вал: Передает крутящий момент.
- Подшипники: Обеспечивают плавное вращение ротора.
Принцип работы шагового двигателя: Как он делает «шаг»?
Вращение ротора в шаговом двигателе происходит за счет управляемого взаимодействия магнитных полей. Обмотки статора создают электромагнитные поля, которые притягивают или отталкивают полюса ротора, заставляя его перемещаться на заданный угол — один «шаг».
Пошаговое намагничивание:
Представьте себе упрощенный 4-фазный шаговый двигатель. Чтобы заставить его вращаться, управляющая электроника (драйвер) последовательно подает напряжение на обмотки статора. Это создает «вращающееся» магнитное поле.
- Шаг 1: Включается Обмотка A. Её магнитное поле притягивает ближайшие полюса ротора, фиксируя его в определенном положении.
- Шаг 2: Обмотка B включается, а Обмотка A выключается (или наоборот, в зависимости от схемы). Магнитное поле перемещается, и ротор поворачивается на следующий шаг, чтобы выровняться с новым магнитным полем.
- Шаг 3: Обмотка C включается, Обмотка B выключается. Ротор снова поворачивается.
- Шаг 4: Обмотка D включается, Обмотка C выключается. Ротор завершает цикл движения на определенное количество шагов.
Таким образом, последовательная подача импульсов на обмотки статора заставляет ротор двигаться дискретно, шаг за шагом. Чем меньше угол шага, тем точнее позиционирование и тем плавнее движение.
Типы шаговых двигателей: Различия и области применения
Существуют три основных типа шаговых двигателей, каждый из которых имеет свои особенности, преимущества и области применения.

1. Двигатели с постоянными магнитами (PM — Permanent Magnet Stepper Motors)
- Описание: Ротор выполнен из постоянных магнитов.
- Принцип: Вращение происходит за счет притяжения или отталкивания постоянных магнитов ротора и электромагнитов статора.
- Преимущества: Проще в конструкции, дешевле в производстве, обеспечивают относительно большой крутящий момент на низких скоростях.
- Недостатки: Меньшая точность (угол шага обычно больше, например, 7.5° или 15°), крутящий момент значительно падает на высоких скоростях.
- Применение: Используются в простых механизмах, игрушках, бюджетных устройствах, где не требуется высокая точность.
2. Двигатели с переменным магнитным сопротивлением (VR — Variable Reluctance Stepper Motors)
- Описание: Ротор состоит из зубчатого сердечника из мягкого железа, без постоянных магнитов.
- Принцип: Ротор всегда стремится занять положение, где магнитное сопротивление между зубцами статора и ротора минимально. Путем последовательного намагничивания обмоток статора, ротор перемещается.
- Преимущества: Высокая скорость работы, простая и надежная конструкция, отсутствие остаточного намагничивания.
- Недостатки: Низкий крутящий момент, отсутствие удержания позиции без питания, как правило, более шумные.
- Применение: Встречались в старых принтерах и устройствах с умеренными требованиями к точности. Сегодня встречаются реже.
3. Гибридные шаговые двигатели (Hybrid Stepper Motors)
- Описание: Наиболее распространенный и востребованный тип. Сочетают лучшие черты PM и VR двигателей. Ротор имеет и постоянные магниты, и зубчатые полюса.
- Принцип: Комбинация принципов постоянного магнита и переменного сопротивления. Ротор обычно состоит из двух «чашек» с зубцами, разделенных постоянным магнитом, что позволяет добиться очень маленького шага и высокого крутящего момента.
- Преимущества:
- Высокая точность: Обеспечивают очень малый угол шага (обычно 1.8° или 0.9°).
- Высокий крутящий момент: Стабильно высокий крутящий момент во всем диапазоне скоростей.
- Плавный ход: Меньше вибраций и шума по сравнению с PM и VR.
- Недостатки: Более сложная конструкция и, как правило, более высокая стоимость по сравнению с PM двигателями.
- Применение: Повсеместно используются там, где требуется высокая точность и надежность: 3D-принтеры, станки с ЧПУ, робототехника, медицинское оборудование, сканеры, прецизионные приборы.
Режимы управления шаговым двигателем: Точность и плавность
Способ подачи тока на обмотки двигателя определяет не только его движение, но и точность позиционирования, плавность хода и уровень шума. Существуют три основных режима управления.
1. Полношаговый режим (Full Step)
- Описание: На каждую фазу двигателя подается полный ток. Ротор перемещается на полный номинальный шаг (например, 1.8° для типичного двигателя).
- Принцип: Одновременно активна одна или две обмотки в зависимости от типа двигателя. Это самый простой режим управления.
- Преимущества: Обеспечивает максимальный крутящий момент от двигателя.
- Недостатки: Низкое разрешение (крупный шаг), ощутимые вибрации и шум, рывки при движении.
2. Полушаговый режим (Half Step)
- Описание: Чередование полношагового (две обмотки включены) и однофазного (одна обмотка включена) возбуждения. Это удваивает разрешение двигателя, деля номинальный шаг пополам (например, 0.9°).
- Принцип: Последовательность включения обмоток меняется, например: Обмотка A -> Обмотки A+B -> Обмотка B -> Обмотки B+C и так далее.
- Преимущества: Вдвое большее разрешение по сравнению с полношаговым режимом, более плавный ход, снижение резонансов и вибраций.
- Недостатки: Крутящий момент на «полушаге» может быть несколько ниже, чем на «полном шаге».
3. Микрошаговый режим (Microstepping)
- Описание: Самый продвинутый режим. Вместо простого включения/выключения обмоток, на них подается ток различной величины, обычно в виде синусоидальных волн. Это позволяет создавать промежуточные положения магнитного поля, деля номинальный шаг на множество мельчайших микрошагов (от 4 до 256 и более).
- Принцип: Ток распределяется между обмотками таким образом, чтобы ротор останавливался не только на «целых» или «половинных» шагах, но и между ними.
- Преимущества:
- Максимальное разрешение: Обеспечивает очень точное позиционирование.
- Исключительная плавность хода: Практически полное отсутствие вибраций и шума, что критично для 3D-печати и прецизионного оборудования.
- Снижение механических резонансов в системе.
- Недостатки:
- Требует более сложного и дорогого драйвера (с ШИМ — широтно-импульсной модуляцией).
- Крутящий момент может значительно падать на промежуточных микрошагах, особенно при очень высоких делениях.
- Чувствительность к механическим нагрузкам при малых токах.
- Применение: Широко используется в 3D-принтерах (для качества поверхности), станках с ЧПУ (для высочайшей точности), сканерах, оптических и медицинских приборах.
Управление шаговым двигателем: Драйверы и контроллеры
Система управления шаговым двигателем состоит из двух ключевых компонентов: контроллера и драйвера. Понимание их ролей крайне важно.
1. Роль контроллера
Контроллер — это «мозг» системы. Он генерирует последовательность управляющих импульсов, которые сообщают двигателю, куда и как двигаться.
- Функция: Принимает команды (например, от программы ЧПУ или пользовательского интерфейса) и преобразует их в последовательность сигналов STEP (импульс для каждого шага) и DIR (направление вращения).
- Примеры: Микроконтроллеры (например, на платах Arduino, ESP32), специализированные платы ЧПУ (Grbl, Mach3, LinuxCNC), промышленные программируемые логические контроллеры (ПЛК).
2. Роль драйвера шагового двигателя
Драйвер шагового двигателя — это «мускулы» системы. Он получает низковольтные управляющие сигналы от контроллера и преобразует их в сильноточные импульсы, необходимые для питания обмоток двигателя.
- Функция: Подача необходимого тока на обмотки двигателя в правильной последовательности и режиме.
- Основные задачи драйвера:
- Коммутация тока: Правильная подача тока на обмотки для создания вращающегося магнитного поля.
- Регулирование тока: Поддержание заданного тока в обмотках независимо от напряжения питания. Это критично для стабильного крутящего момента и предотвращения перегрева двигателя. Большинство современных драйверов используют ШИМ (PWM) для эффективного регулирования тока.
- Выбор режима: Большинство драйверов позволяют выбирать режим работы (полношаг, полушаг, микрошаг) с помощью перемычек или программно.
- Защита: Современные драйверы обычно имеют встроенные защиты от перегрева, перегрузки по току и короткого замыкания.
- Типы драйверов: Наиболее распространены драйверы с управлением по току (например, на микросхемах A4988, DRV8825, а также более продвинутые TMC-драйверы, такие как TMC2208/2130, известные своей бесшумностью).
Преимущества и недостатки шаговых двигателей
Как и любая технология, шаговые двигатели имеют свои сильные и слабые стороны.
Преимущества:
- Высокая точность и повторяемость: Позволяют выполнять точное позиционирование без необходимости в дорогостоящих датчиках обратной связи, пока двигатель не пропускает шаги.
- Простота управления: Для работы достаточно цифровых импульсов.
- Высокий крутящий момент на низких скоростях: Идеально подходят для приложений, требующих удержания позиции под нагрузкой.
- Надежное удержание позиции: Двигатель остается заблокированным в своей текущей позиции, пока на обмотки подается ток.
- Относительно низкая стоимость: Дешевле многих сервосистем с аналогичной точностью.
Недостатки:
- Потеря шагов: При перегрузке, слишком высокой скорости или неправильной настройке драйвера двигатель может пропустить шаги, и система «потеряет» свое текущее положение без внешнего контроля.
- Ограничение по максимальной скорости: Крутящий момент шагового двигателя значительно падает с ростом скорости.
- Шум и вибрации: Особенно заметны на полношаговом режиме.
- Постоянное потребление тока: Даже в режиме удержания позиции двигатель потребляет ток, что приводит к нагреву.
- Нагрев: Требует адекватного охлаждения, особенно при длительной работе под нагрузкой.
Области применения шаговых двигателей
Шаговые двигатели стали незаменимыми во множестве сфер, где требуется точное, управляемое движение:
- 3D-печать: Основной привод для осей X, Y, Z и экструдеров.
- Станки с ЧПУ: Фрезеры, лазерные резаки, граверы, где они обеспечивают точное перемещение инструмента или заготовки.
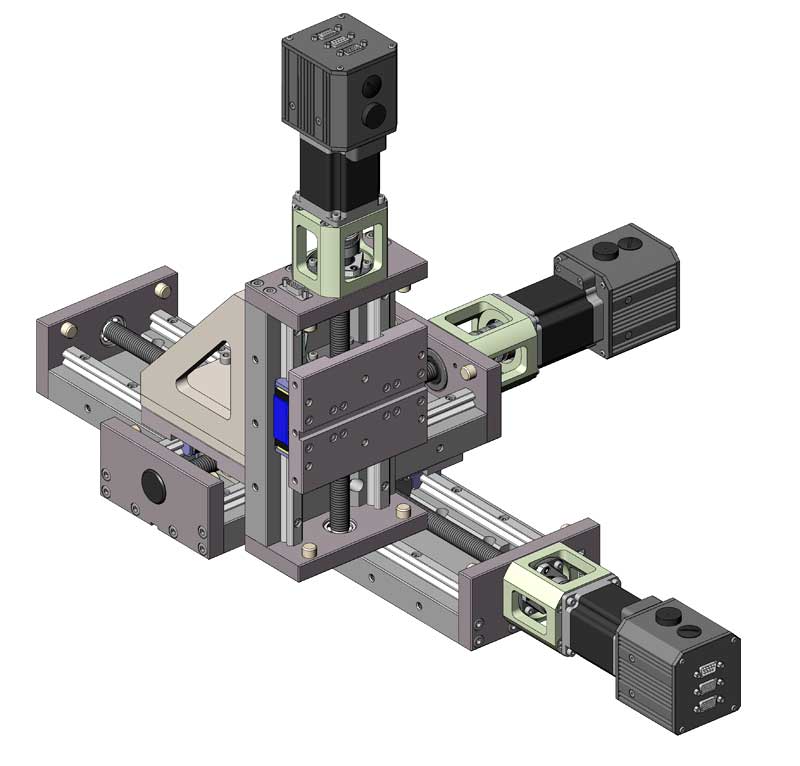
- Робототехника: В манипуляторах, мобильных платформах, для точного управления конечностями.
- Офисная техника: Принтеры, сканеры, копировальные аппараты для точного перемещения печатающих головок или сканирующих элементов.
- Медицинское оборудование: В дозаторах, анализаторах, прецизионных насосах.
- Оптические приборы: Для точных настроек линз, диафрагм, фокусировки.
- Автомобильная промышленность: Управление клапанами, приводами зеркал.
- Камеры видеонаблюдения: Для точного позиционирования по осям панорамирования и наклона.
Критерии выбора шагового двигателя
Выбор правильного шагового двигателя имеет решающее значение для успеха вашего проекта. Учитывайте следующие параметры:
- Требуемый крутящий момент: Это самый важный параметр. Двигатель должен обеспечивать достаточный крутящий момент для перемещения нагрузки с запасом, особенно при требуемых скоростях.
- Разрешение (угол шага): Определяется требованиями к точности позиционирования (например, 1.8°, 0.9° или меньше при микрошаге).
- Размер (фланец NEMA): Стандартизированные размеры фланца (например, NEMA 17, NEMA 23, NEMA 34) определяют физические габариты и, как правило, мощность двигателя.
- Номинальное напряжение и ток: Должны соответствовать возможностям вашего драйвера.
- Количество фаз (биполярный/униполярный): Биполярные двигатели обычно обеспечивают больший крутящий момент, но требуют более сложного драйвера. Униполярные проще управляются.
- Наличие энкодера: Для приложений, где критически важна обратная связь по положению, чтобы предотвратить пропуск шагов и повысить надежность.
- Условия эксплуатации: Температура окружающей среды, наличие влаги или пыли.
Устранение распространенных проблем (Кратко)
- Пропуск шагов: Часто связан с недостаточным крутящим моментом для текущей нагрузки, слишком высокой скоростью или ускорением, неправильным током драйвера или механическими заеданиями в системе.
- Перегрев: Обычно вызван слишком высоким током, установленным на драйвере, или недостаточным охлаждением двигателя.
- Шум/Вибрации: Могут быть результатом использования полношагового режима, низкокачественного драйвера или механических резонансов в конструкции. Переход на микрошаговый режим или использование демпфирующих элементов часто помогает.
Заключение
Шаговые двигатели являются универсальным и надежным решением для бесчисленных приложений, требующих точного и контролируемого движения без необходимости в сложной системе обратной связи. Их значимость в современной автоматизации, от бытовой техники до промышленных станков с ЧПУ и сложной робототехники, трудно переоценить. Понимание их принципов работы, типов и режимов управления позволяет инженерам и разработчикам создавать эффективные и точные системы.
Компания LAIYIN является экспертом в области высокоточного линейного позиционирования. Мы предлагаем не только передовые линейные модули, но и интегрируем в наши решения компоненты, которые обеспечивают исключительную точность и надежность, включая эффективные системы управления движением. Наш опыт и современное оборудование позволяют нам создавать компоненты, которые идеально подходят для требовательных приложений с использованием шаговых двигателей, обеспечивая плавность, точность и долговечность.