В современной промышленной автоматизации интеграция систем линейного перемещения с ЧПУ и робототехническими комплексами является ключевым фактором, определяющим производительность, точность и технологические возможности производства. Синергия этих систем позволяет расширять рабочую зону, повышать точность позиционирования и оптимизировать процессы обработки.
Интеграция достигается через синхронизацию движения нескольких осей и координацию управляющих систем, что делает возможным создание гибких и высокоточных автоматизированных комплексов. Такие системы способны выполнять сложные задачи, включая крупноформатную обработку, автоматическую сборку и транспортировку компонентов. Понимание преимуществ и особенностей интеграции систем линейного перемещения с ЧПУ и робототехникой важно для инженеров и специалистов по автоматизации, стремящихся к оптимизации производственных процессов и повышению эффективности производства.
Оглавление
- Зачем интегрировать линейные системы с ЧПУ и робототехникой?
- Какие компоненты обеспечивают эту интеграцию?
- Как интеграция влияет на производительность и гибкость?
- С какими основными проблемами можно столкнуться при интеграции?
- Какие примеры применения демонстрируют ценность этой интеграции?
- Каково будущее технологии?
Зачем интегрировать линейные системы с ЧПУ и робототехникой?
Интеграция систем линейного перемещения с ЧПУ и робототехникой необходима для расширения рабочей зоны, повышения точности и создания координированного многоосевого движения, недоступного для одной системы. Например, шестиосевой робот, установленный на линейной направляющей, может выполнять задачи на значительно большей площади, что критически важно для производства крупногабаритных изделий. Это объединение позволяет использовать преимущества каждой технологии.
Какие компоненты обеспечивают эту интеграцию?
Интеграция обеспечивается за счет скоординированного взаимодействия между механическими компонентами, такими как линейные направляющие и приводы, и электронными системами, включая контроллеры ЧПУ и роботов, а также высокоскоростные коммуникационные интерфейсы. Для успешной интеграции все элементы должны работать как единое целое.
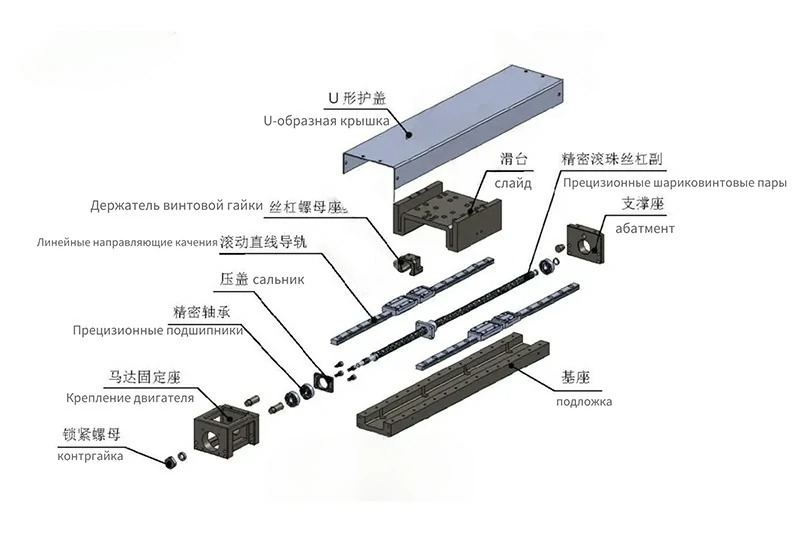
- Механические компоненты:
- Линейные системы: Линейные направляющие, шарико-винтовые пары, ременные или линейные двигатели. Они обеспечивают точное и надежное перемещение.
- Роботизированная рука: Многоосевая рука, которая выполняет задачи.
- Электронные компоненты:
- Контроллер ЧПУ: Управляет движением линейных осей.
- Контроллер робота: Управляет осями робота.
- Коммуникационный интерфейс: Протоколы, такие как EtherCAT или Profinet, позволяют контроллерам обмениваться данными с высокой скоростью.
- Системы обратной связи: Энкодеры на каждой оси передают данные о фактическом положении в реальном времени.
Как интеграция влияет на производительность и гибкость?
Интеграция значительно повышает производительность за счет сокращения времени цикла и расширения рабочей зоны, а также увеличивает гибкость, позволяя быстро адаптироваться к новым задачам. Это позволяет одному роботу обслуживать несколько рабочих станций или обрабатывать очень длинные детали, что было бы невозможно в стационарной конфигурации.
Влияние на производительность:
- Увеличение рабочей зоны: Робот может перемещаться по длинной оси, обслуживая несколько станций. Это устраняет необходимость в нескольких роботах.
- Сокращение времени цикла: Задачи, которые ранее требовали сложного перемещения детали, теперь могут быть выполнены одним движением робота.
- Высокая точность: Согласованное движение между осями робота и линейными осями повышает общую точность. Это особенно важно для задач, требующих высокой повторяемости.
Влияние на гибкость:
- Адаптивность: Система может быть легко перепрограммирована для выполнения новых задач.
- Масштабируемость: Добавление новых линейных осей позволяет легко нарастить производственные мощности.
- Сложные траектории: Интегрированное управление позволяет создавать и выполнять сложные траектории движения.
С какими основными проблемами можно столкнуться при интеграции?
Основными проблемами при интеграции являются необходимость точной механической синхронизации, сложность программирования движения, обеспечение надежной высокоскоростной связи между контроллерами и минимизация люфтов в системе. Неточности в любой из этих областей могут привести к сбоям, ошибкам позиционирования и снижению общей производительности системы.
- Механическая точность: Все линейные оси должны быть установлены с высочайшей точностью. Любой перекос или непараллельность приведет к заеданию и износу.
- Синхронизация управления: Контроллеры ЧПУ и робота должны работать в идеальной синхронизации. Проблемы с коммуникацией могут вызвать задержки, которые приведут к ошибкам.
- Программирование: Написание программы, координирующей движение всех осей, является сложной задачей. Часто требуется специализированное программное обеспечение.
- Люфты и жесткость: Накопление люфтов в каждой оси может снизить общую точность. Использование высококачественных компонентов и точная настройка помогают минимизировать эту проблему.
Какие примеры применения демонстрируют ценность этой интеграции?
Интеграция систем линейного перемещения с ЧПУ и робототехникой находит широкое применение в различных отраслях, от тяжелой промышленности до высокотехнологичных производств, демонстрируя свою ценность в реальных условиях. Эти примеры подчеркивают, как синергия технологий решает задачи, которые были бы невыполнимы для отдельных систем.
- Крупноформатная обработка: Робот с фрезой, установленный на длинной линейной оси, может обрабатывать детали для самолетов или ветрогенераторов.
- Автоматическая сварка: Робот-сварщик, перемещающийся по длинной направляющей, может выполнять непрерывный шов на крупногабаритных конструкциях, таких как корпуса судов.
- Системы «pick and place»: Робот, перемещающийся по линейной оси, может обслуживать несколько конвейерных лент, выполняя сортировку или упаковку.
- 3D-печать: Крупноформатные 3D-принтеры используют линейные оси для точного перемещения экструдера на большой площади.
Каково будущее технологии?
Будущее интеграции систем линейного перемещения с ЧПУ и робототехникой связано с развитием технологий искусственного интеллекта и машинного обучения, а также с упрощением программного обеспечения и расширением использования роботов-манипуляторов. Эти технологии позволят системам самостоятельно адаптироваться к изменениям и оптимизировать траектории.
- Искусственный интеллект и машинное обучение: Системы смогут самостоятельно оптимизировать траектории движения, сокращая время цикла и повышая точность.
- Упрощение программирования: Разработка более интуитивных программных интерфейсов, которые позволят неспециалистам легко настраивать сложные системы.
- Сотрудничество человека и робота (коботы): Коллаборативные роботы, установленные на линейных направляющих, смогут работать вместе с человеком на общей рабочей площади. Это позволит повысить производительность и гибкость.
Заключение
Интеграция систем линейного перемещения с ЧПУ и робототехникой — это не просто технологический тренд, а стратегическое направление развития, которое позволяет предприятиям повысить эффективность, точность и гибкость. Эта синергия открывает новые возможности для автоматизации, позволяя решать задачи, которые ранее считались невыполнимыми. Понимание ключевых факторов интеграции — от выбора компонентов до программирования — является необходимым условием для успеха в современном производстве.
Компания LAIYIN — ваш надёжный партнер в сфере высокоточного линейного перемещения. Мы специализируемся на разработке и производстве комплексных линейных систем, которые обеспечивают исключительную точность и надёжность. Благодаря использованию импортного сырья, современного оборудования и глубокой экспертизе в проектировании, мы предлагаем индивидуальные решения для успешной интеграции с ЧПУ и робототехникой.



